Jiahe Chen

Affiliations: School of Engineering, The University of Tokyo.
chenjh
I am currently a PostDoctroal researcher of the Biomedical Precision Engineering Lab (BMPE), in the School of Engineering at The University of Tokyo.
My research interest lies in the area of computer assisted intervention (CAI) and robotic surgery, with the mission to raise the level of surgery autonomy and intelligence, relieve the surgery burden and improve surgery safety. My previous research experience mostly lies in medical image analysis and perception for robotic surgery, including image segmentation, image registration (rigid and deformable), surgical instrument pose estimation, tissue deformation recovery, and digital twin for soft tissue manipulation in robotic surgery. My current and future work include visual servoing for surgery autonomy and laparoscopic image-based biomechanical analysis as extra modality for surgical guidance and assessment.
I received my PhD degree in Precision Engineering at The University of Tokyo in 2025 supervised by Professor Etsuko Kobayashi, Master degree in Biomedical Engineering at The University of Tokyo in 2022 supervised by Professor, and Bachelor degree in Mechanical Engineering at Beihang University in 2020 supervised by Professor Junchen Wang. Between 2019 and 2020, I was an exchange/visiting student at the Computer Aided Medical Procedures Lab, Technical University of Munich, and Lee Ultrasound Imaging Group, The University of Hong Kong.
news
| Sep 19, 2024 | Our work in digital twin for soft tissue manipulation was accepted by Robotics and Automation Letters (RA-L) |
|---|---|
| Jun 17, 2024 | Our paper in soft tissue deformation recovery accepted to MICCAI 2024 |
| May 13, 2024 | Our work in digital twin for soft tissue manipulation in ICRA 2024 workshop won the best poster award |
| Jun 21, 2023 | Our work in tissue deformation recovery won the CAI Award Runner-up in International Conference on Information Processing in Computer-Assisted Interventions (IPCAI) 2023 |
selected publications
-
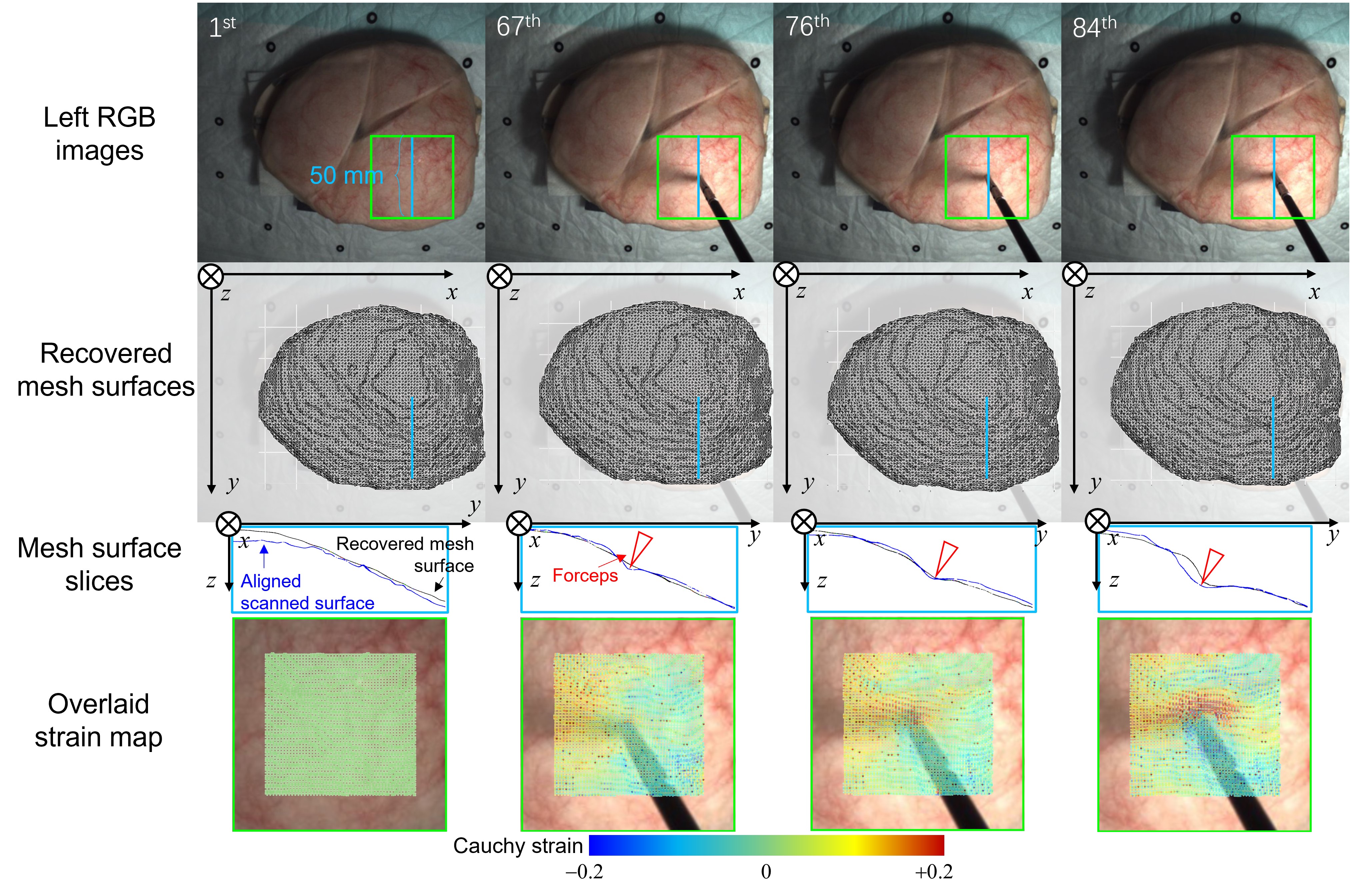 Occlusion-robust scene flow-based tissue deformation recovery incorporating a mesh optimization modelInternational Journal of Computer Assisted Radiology and Surgery ( IJCARS - IPCAI 2023 Special Issue), 2023
Occlusion-robust scene flow-based tissue deformation recovery incorporating a mesh optimization modelInternational Journal of Computer Assisted Radiology and Surgery ( IJCARS - IPCAI 2023 Special Issue), 2023 -
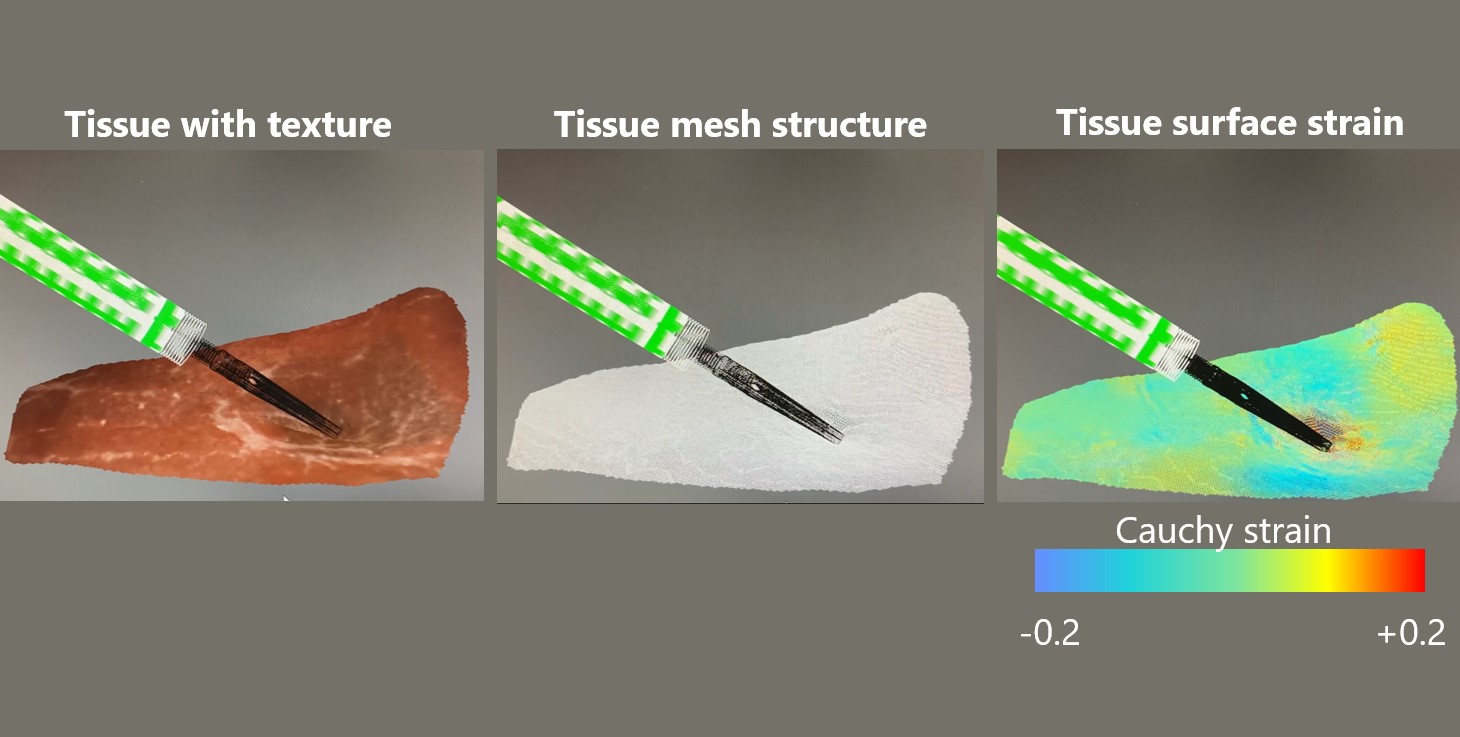 SurgEM: A Vision-based Surgery Environment Modeling Framework for Constructing a Digital Twin towards Autonomous Soft Tissue ManipulationIEEE Robotics and Automation Letters (RA-L), 2024
SurgEM: A Vision-based Surgery Environment Modeling Framework for Constructing a Digital Twin towards Autonomous Soft Tissue ManipulationIEEE Robotics and Automation Letters (RA-L), 2024 -
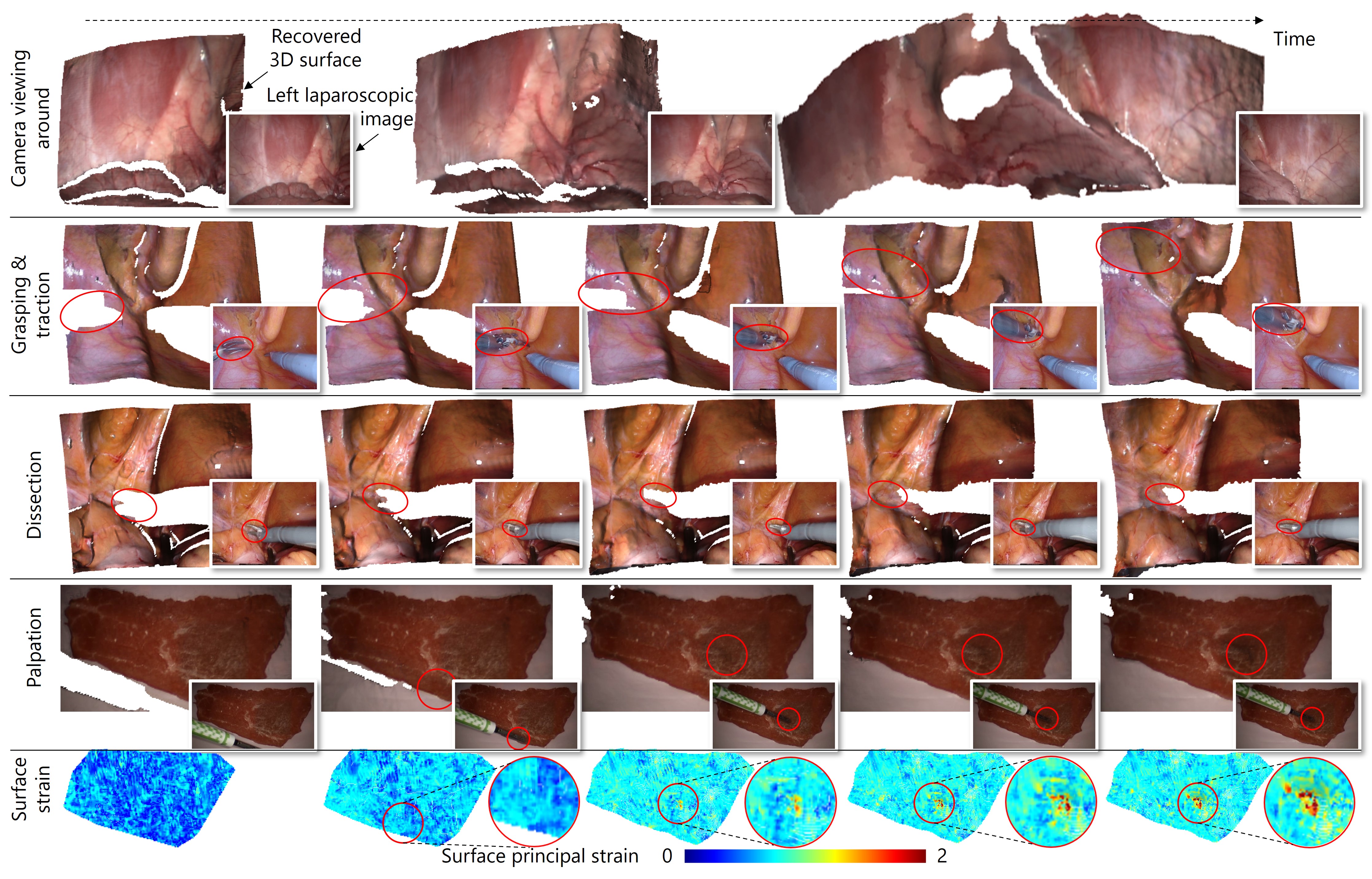 Trans-Window Panoramic Impasto for Online Tissue Deformation RecoveryIn International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI), 2024
Trans-Window Panoramic Impasto for Online Tissue Deformation RecoveryIn International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI), 2024